
Technology Innovator

Easy system
Integration

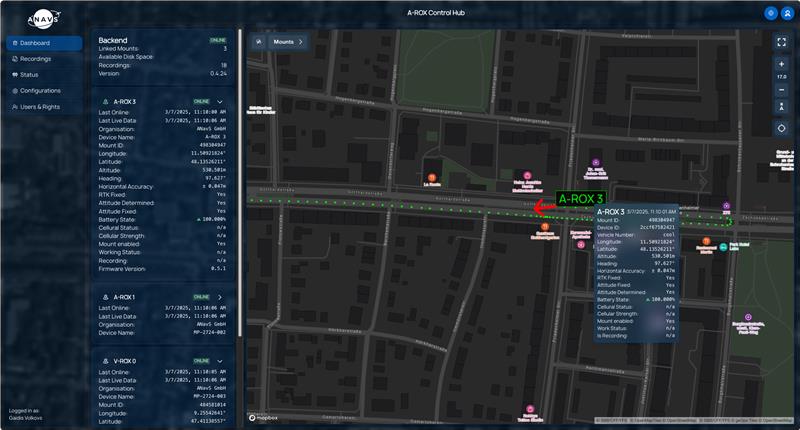
Web-App

Breakthrough Pricing
Minimal Warm-up time

ACOM Data Stream

ROS 2
HAS Technology
(Galileo's High Accuracy Service)

OSNMA (Open Service Navigation Message Authentification)

Made in Germany