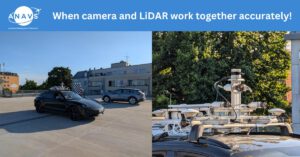
🚀 35 °C, sunshine and precise sensor fusion – that was our calibration day above the rooftops of Munich. ➡️ Yesterday, we calibrated our sensor platform in summer temperatures – a standard but crucial step for reliable environmental detection.
What does calibration mean in our case?
🔧 Determining the intrinsic camera matrix
🔧 Determining the extrinsic transformation between camera and LiDAR
Objective: A common coordinate system so that objects such as pedestrians have exactly the same real position in both sensor views (camera + LiDAR). Only when camera and LiDAR are perfectly harmonised can all sensors speak the same language – and we get a clear, coherent view of the surroundings.